Generic Property Specification Language (GPSL) is the language used by OBP2 for specifying the properties that should be verified during the analysis. Currently it supports Linear Temporal Logic and Buchi Automata specifications.
GPSL is only a property-specification language. Methodologically it is orthogonal from the formalisms used for capturing the operational environment (xGDL scenarios) and for taming the state-space explosion problem during model-checking (state-space decomposition, pruning through state-constraints - TLA, etc.).
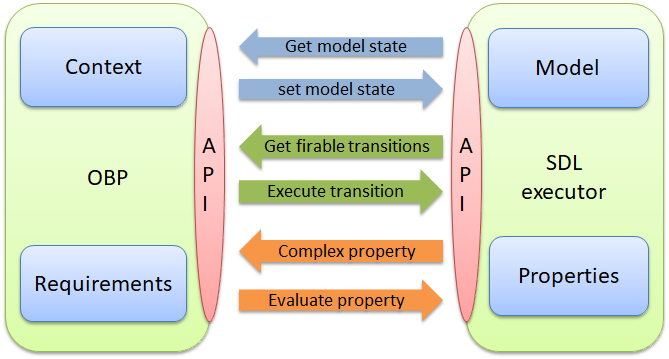
The main characteristic of GPSL is its independence from the formalism used for model-specification. To achieve this independece relation, the GPSL language delegates the evaluation of the atomic properties to the verification model semantics. Thus, from the perspective of the specification language, the atomic proposition are simply a mapping of names to booleans. In other words, the GPSL semantics binds the property to the verification model through a semantics-driven evaluation function.
In GPSL each property is associated with a named variable. All these variables form the property set
Any property can be verified during an analysis run.
Propositional Logic: Syntax & Semantics
There are two Boolean constants predefined in the language: true and false
Atomic proposition in GPSL are strings of characters enclosed between pairs of | (ie. | string of characters |). Each atomic proposition can be prefixed with two identifiers specifying the atomic proposition language and the ‘verification’ module on which it should be interpreted.
Boolean Operators
Two expressions f and g can be combined using the following Boolean operators
| Operation |
syntax0 |
syntax1 |
syntax2 |
syntax3 |
syntax4 |
| negation |
not f |
!f |
~f |
|
|
| disjunction |
f or g |
f | g |
f \/ g |
f + g |
|
| conjunction |
f and g |
f & g |
f && g |
f /\ g |
f * g |
| exclusion |
f xor g |
f ^ g |
|
|
|
| implication |
f implies g |
f -> g |
f => g |
|
|
| equivalence |
f iff g |
f <-> g |
f <=> g |
|
|
Let Expressions
To simplify the expression of large formula GPSL uses Let expression forms to
introduce variables.
let
v1 = expr
v2 = expr
...
vn = expr
in
v1 op v2
Temporal Logic: Syntax & Semantics
The support for LTL is enabled using LTL3Buchi conversion [1].
Temporal Logic Operators
Two expressions f and g can be combined using the following Boolean operators
| operation |
syntax0 |
syntax1 |
syntax2 |
| Next |
X f |
next f |
() f |
| Eventually |
F f |
eventually f |
<> f |
| Always |
G f |
globally f |
[] f |
| Strong Until |
f U g |
f until g |
|
| Weak Until |
f W g |
|
|
| Weak Release |
f R g |
f release g |
f V g |
| Strong Release |
f M g |
|
|
Some LTL examples
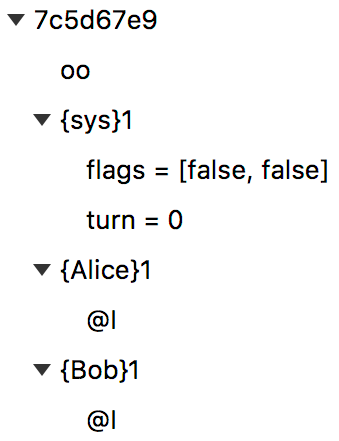
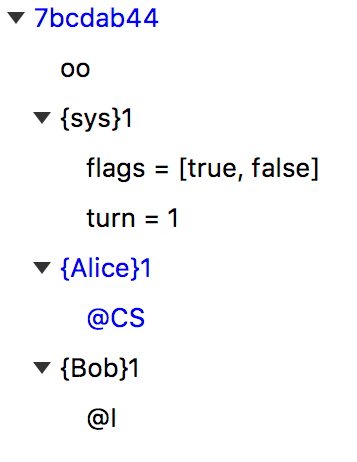
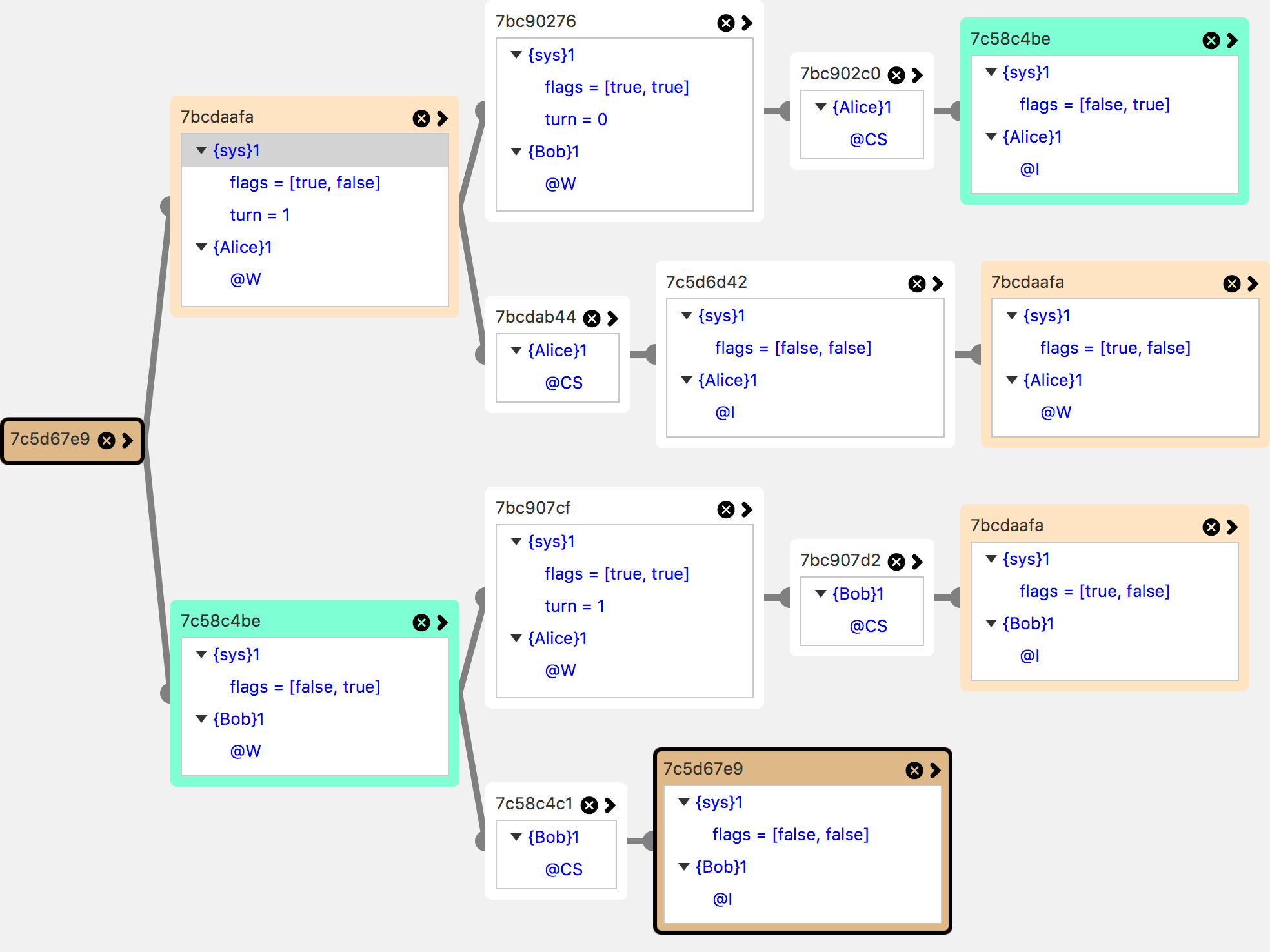
aliceCS = |{Alice}1@CS|
bobCS = |{Bob}1@CS|
exclusionI = []!(|{Alice}1@I| && |{Bob}1@I|)
exclusion = []!(aliceCS && bobCS)
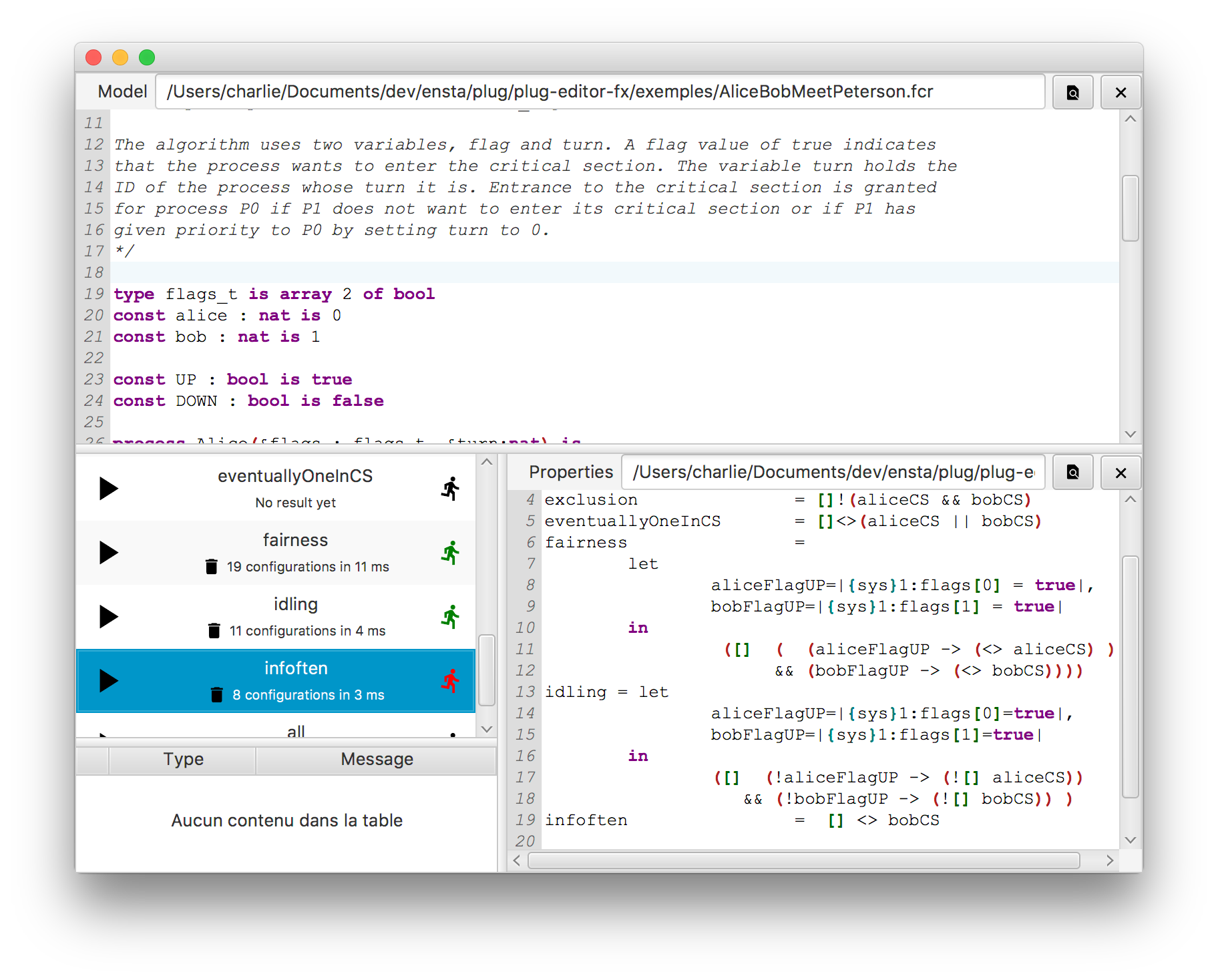
eventuallyOneInCS = []<>(aliceCS || bobCS)
fairness =
let
aliceFlagUP=|{sys}1:flags[0] = true|,
bobFlagUP=|{sys}1:flags[1] = true|
in
([] ( (aliceFlagUP -> (<> aliceCS) )
&& (bobFlagUP -> (<> bobCS))))
idling = let
aliceFlagUP=|{sys}1:flags[0]=true|,
bobFlagUP=|{sys}1:flags[1]=true|
in
([] (!aliceFlagUP -> (![] aliceCS))
&& (!bobFlagUP -> (![] bobCS)) )
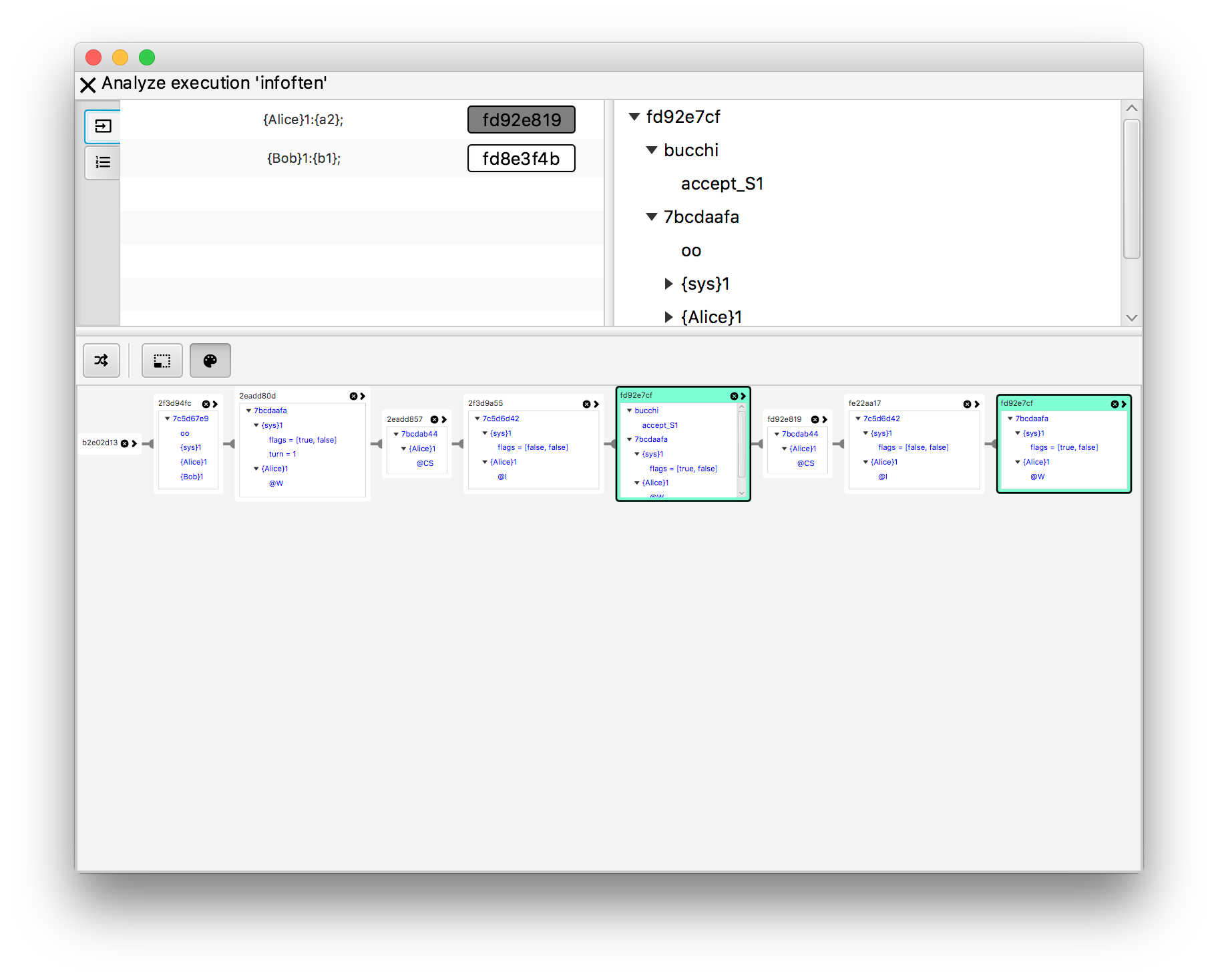
infoften = [] <> bobCS
all = (exclusion & eventuallyOneInCS & fairness & idling)
Buchi Automata
Buchi Automata can be used for expressing properties. In this case the syntax for atomic propositions stays the same.
The named variables, used in the automaton, are restricted to propositional logic constructs.
The in clause of the let construct is extended with the syntactical term for describing the automaton.
In this context an automaton is composed of 4 parts :
- the set of states
- the initial state(s)
- the accepting state(s)
- the guarded transitions
The set of state is defined by the keyword states followed by a comma delimited list of identifiers (state names)
states_rule := 'states' identifier (',' identifier)*
The initial state(s) are introduced with the keyword initial followed by a comma delimited list of state names
initial_rule := 'initial' identifier (',' identifier)*
The accepting state(s) are introduced with the keyword accept followed by a comma delimited list of state names
accept_rule := 'accept' identifier (',' identifier)*
Each transition is specified by the source state, the guard expression, and the target state, where the source and target state are state identifiers, and the guard expression is a propositional logic expression composed using literals (true, false), atomic propositions (|…|), propositional operators (!, and, or, ->, etc), and named variable references.
transition_rule := identifier '[' expression ']' identifier
The automaton is defined by the following syntax:
automaton_rule :=
states_rule ';'
initial_rule ';'
accept_rule ';'
transition_rule (';' transition_rule)*
Buchi Automaton Example
Automaton as named property :
aut1 =
states s0, s1;
initial s0;
accept s1;
s0 [ |a=5| ] s1;
s0 [ true ] s0;
s1 [ |b=7| and |c=2| ] s1
Automaton in let expression :
b1 = let
a1 = |P_1!=wait|,
a2 = |P_0=choose|,
a3 = |P_2!=choose|,
a4 = |number[1]<0|,
p1 = !a3 and !a4,
p2 = a3 and a4,
in
states s0, s1, s2, s3;
initial s0;
accept s2, s3;
s0 [!a2 and !a1] s1;
s0 [(!a1 and p1) or (!a1 and p2)] s2;
s0 [a1] s3;
s1 [!a2] s1;
s1 [|P_1==wait|] s2;
s2 [p1] s2;
s3 [true] s3
References
[1] Babiak, Tomáš, et al. “LTL to Büchi automata translation: Fast and more deterministic.” International Conference on Tools and Algorithms for the Construction and Analysis of Systems. Springer, Berlin, Heidelberg, 2012.
]]>

 Les équipes de Kereval, Mobility Tech Green et l’ENSTA Bretagne ont lancé ce matin (4/12/2019) le projet collaboratif Ker SEVECO en présence des représentants des pôles de compétitivités ID4CAR et Images et Réseaux.
Les équipes de Kereval, Mobility Tech Green et l’ENSTA Bretagne ont lancé ce matin (4/12/2019) le projet collaboratif Ker SEVECO en présence des représentants des pôles de compétitivités ID4CAR et Images et Réseaux.